
![]() 研究背景と課題
研究背景と課題
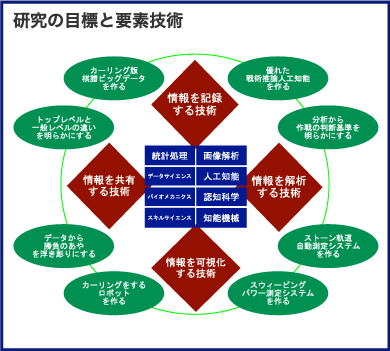
![]() 研究目的
研究目的
![]() 課題解決に向けた取り組み
課題解決に向けた取り組み
![]() 冬季スポーツ科学研究推進センターとの連携
冬季スポーツ科学研究推進センターとの連携


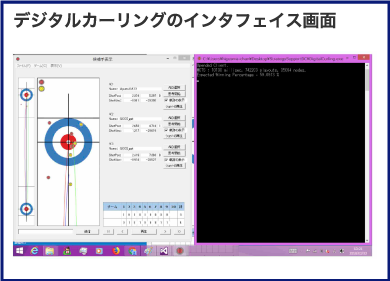
![]() 概要
概要
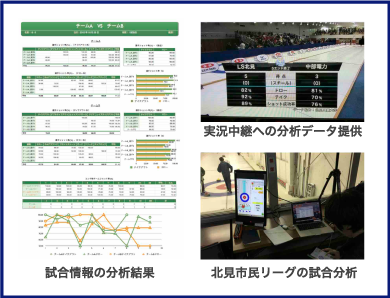
![]() これまでの成果
これまでの成果

![]() 概要
概要
![]() これまでの成果
これまでの成果

![]() 概要
概要
![]() これまでの成果
これまでの成果


![]() 概要
概要
![]() これまでの成果
これまでの成果



![]() 概要
概要
![]() これまでの成果
これまでの成果

![]() 今後の予定
今後の予定


